Henry Noyes
I am a graduate student studying robotics at Northeastern University, where I am in the second year of my MS degree. My research focuses on perception and controls, primarily in the context of snake robots. I am advised by Professor Alireza Ramezani in the Silicon Synapse Lab.
My studies are supported by the NASA Space Technology Graduate Research Fellowship. I have developed novel mobility platforms at NASA Ames Research Center, built computer vision frameworks for a DARPA-funded mixed reality project, and researched at a plasma energy startup.
I am passionate about space exploration and the science of machine intelligence. In my free time, I like to build things.

Papers
 |
Advanced Intelligent Systems, September 2025
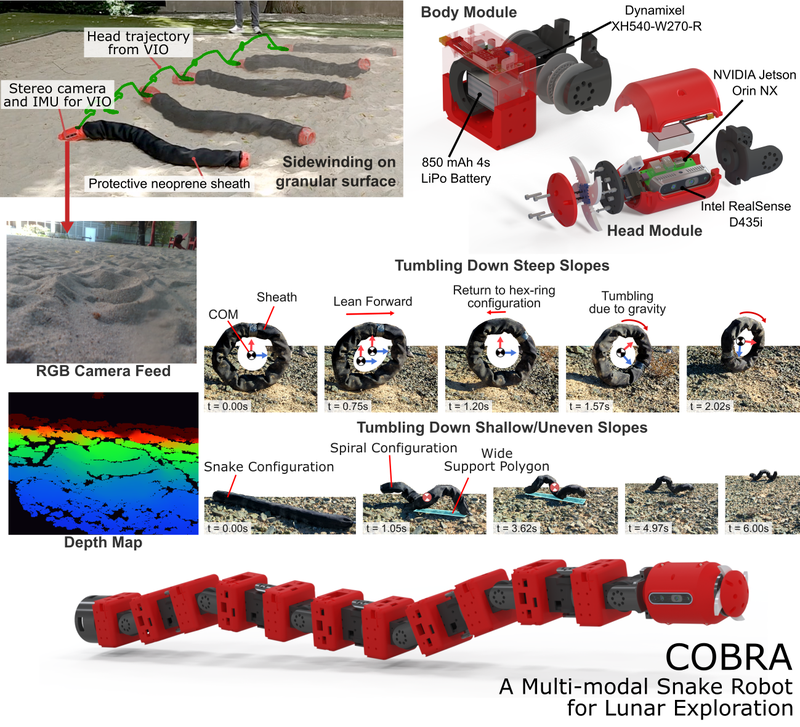
Crater Observing Bio-inspired Rolling Articulator (COBRA) is a modular, snake-inspired robot that addresses the mobility challenges of extraterrestrial exploration sites such as Shackleton Crater. Incorporating snake-like gaits and tumbling locomotion, COBRA navigates both uneven surfaces and steep crater walls. We present the robot's design, dynamic modeling, high-fidelity simulations, and field validation demonstrating its multi-modal capabilities.
|
 |
IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 2024
Rough terrain locomotion has remained one of the most challenging mobility questions. In 2022, NASA's Innovative Advanced Concepts (NIAC) Program invited US academic institutions to participate NASA's Breakthrough, Innovative & Game-changing (BIG) Idea competition by proposing novel mobility systems that can negotiate extremely rough terrain, lunar bumpy craters. In this competition, Northeastern University won NASA's top Artemis Award award by proposing an articulated robot tumbler called COBRA (Crater Observing Bio-inspired Rolling Articulator). This report briefly explains the underlying principles that made COBRA successful in competing with other concepts ranging from cable-driven to multi-legged designs from six other participating US institutions.
|
Work
 |
Visiting Graduate Researcher, Intelligent Robotics Group, NASA Ames Research Center
Mountain View, CA
As part of my NSTGRO Fellowship, I spent a summer at NASA ARC researching novel mobility solutions for crater exploration. I developed a method for tumbling tensegrity robot control, validating the framework in simulation and real-world experiments. |
 |
Student Researcher, Silicon Synapse Lab, Northeastern University
Boston, MA
I have been researching in the Silicon Synapse Lab under Professor Alireza Ramezani for four years. As an undergraduate student, I was the electrical lead for COBRA (Crater Observing Bio-inspired Rolling Articulator), a modular snake-like robot that won 1st place in the 2022 NASA BIG Idea Challenge. COBRA has been featured by National Geographic, NASA, and WIRED, and has been published in top robotics conferences.
|
 |
Robotics Engineer, RIVeR Lab, Northeastern University
Boston, MA
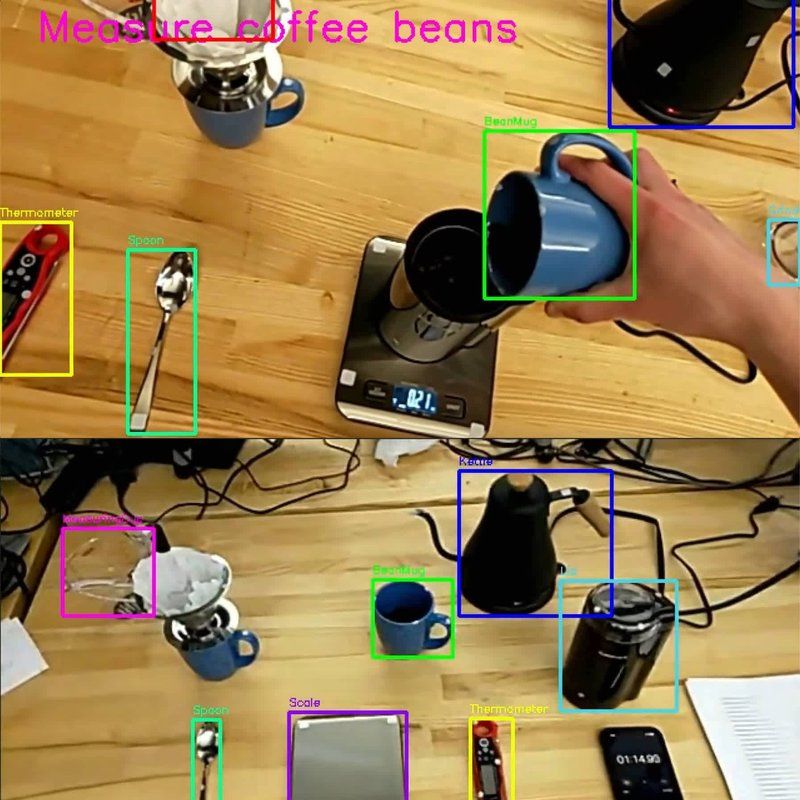
During my time in RIVeR, I led the data processing and system integration efforts on a DARPA-funded mixed reality project focused on perceptually-enabled task guidance (PTG). I developed a ROS2 architecture to efficiently collect and store data from the Microsoft HoloLens 2 headset. I also assisted in training object detection and action recognition models, and created an automated object annotation pipeline using OptiTrack motion capture. |
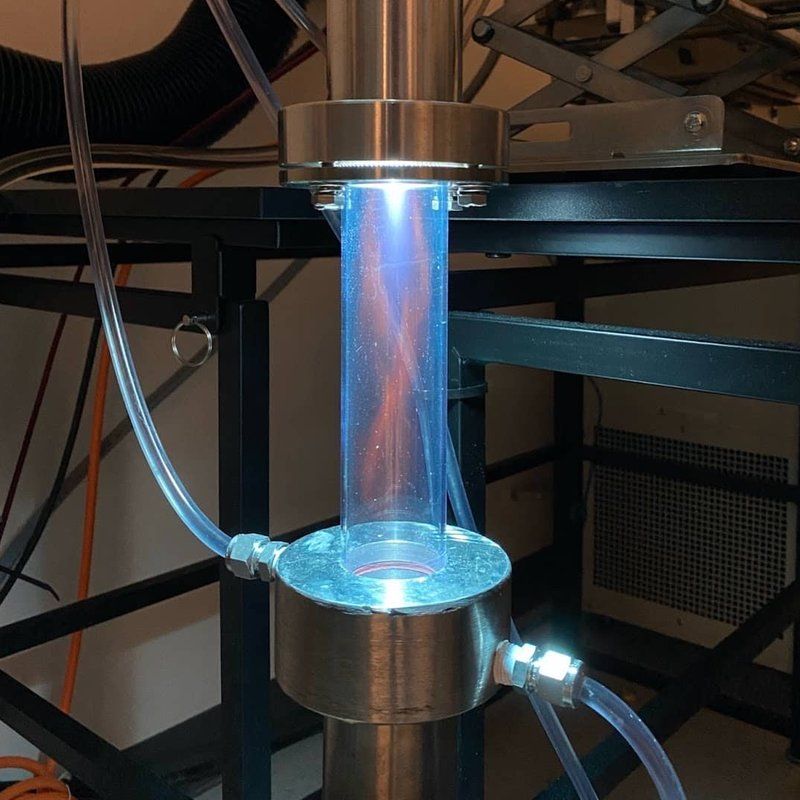 |
Plasma Engineer, MAAT Energy
Cambridge, MA
In my six-month co-op at MAAT, I modeled electromagnetic fields in COMSOL to assist plasma applicator design. I also developed, fabricated, and tested 3 novel solutions to microwave plasma ignition that are scalable to high-power systems. At the end of my co-op, I consolidated my work in several reports submitted to the U.S. Department of Energy. |